Automatic discard filters
GPSLog Labs currently has 2 "discard" filters that run automatically to clean bad data out of GPS tracks.
Speed Filter
This filter is the easiest to understand: It will discard any points where the speed is above a certain threshold.
It has two parameters, the cutoff speed (e.g. 20 km/h for running) and the number of points to discard either side of the "bad" point.
After the points have been discarded, the log will be interpolated between the remaining points, hopefully giving you a more accurate trace of your activity.
Static Navigation
The static navigation filter will only be useful if you have a GPS logger with a chipset that includes this "feature" and you can't disable it (e.g. a logger using the SiRF Star III chipset such as the AMOD AGL 3080.) More details on static navigation can be found by reading http://www.etenblog.com/2007/11/20/static-navigation-explained/ and http://www.gpspassion.com/forumsen/topic.asp?TOPIC_ID=25575.
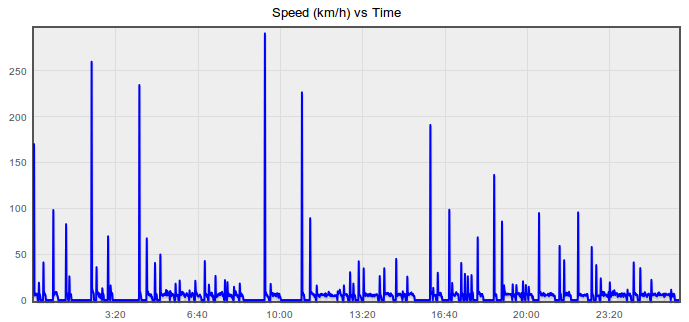
Basically, in this mode (which is optimized for driving, not walking or running), when your speed is below 5km/h the logger will "clamp" your position on the assumption it's getting some kind of signal "drift". When it decides you really have moved the logged position will "jump" giving you a log that looks something like the following:
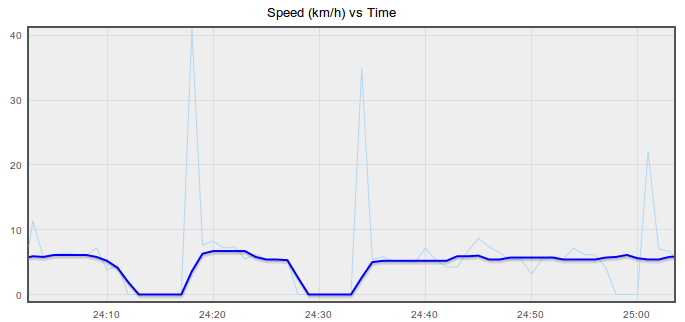
Applying a simple median filter to this data doesn't really help (see the detail below) as there are still lots of samples at the same location:
The static navigation filter will detect these points and remove not just the point, but as many of the "clamped" points as it can, giving a much better result:
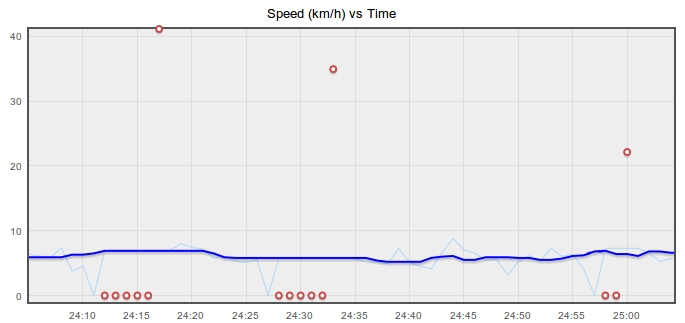
(Note that this still needs a median filter to get the best results.)
The next post will describe the "manual" discard filters.